|
Dongdong Jin, Jiangfan Yu, Ke Yuan, and Li Zhang
Department of Mechanical and Automation Engineering
Introduction
In 1950s, Richard Feynman, winner of Nobel prize, firstly proposed the idea of "swallowable surgeons", to diagnose and treat diseases inside tiny structures in human body. With the development of technology, magnetic actuated microrobots have been considered as a powerful tool to realize the fantasy and conduct biomedical tasks including targeted delivery, remote sensing, in-vivo tracking and therapy. Magnetic field is regarded as a promising actuation method for microrobots in human body, owing to the properties that human body is transparent to magnetic field and limited strength of magnetic field have few side effects to living cells. The small size of microrobots and microrobotic swarm enables them to reach narrow structures inside human body for complex tasks and provide surgeons an innovative tool to conduct minimally invasive operations with high precision. The technical challenges lie in the design of behaviors of microrobots and microrobotic swarms, including tracking, actuation and control strategies to conduct demanded complex in-vivo tasks. Biocompatible materials should also be developed to ensure safety during and after operations and be able to be eliminated from human body with limited side-effects. The performance of robots or robotic swarms under body environment also requires further attention, and smart magnetic manipulation systems that provide magnetic field for microrobots also deserve investment to build the bridge between the small working area under microscopes and the large working space inside human body. Herein, progress in microrobotic swarm assembly and control, remote sensing capability and applications will be introduced.
(a) Multifunctional Reconfigurable Microrobotic Swarm
In nature, various kinds of creatures could form intelligent swarms that can change shape when interact with surrounding environments, such as bird flocks, and bacteria colonies. In robotics, robotic swarm has attracted abundant attention in robotic research these days, due to the flexibility, compatibility with surrounding environments and capability of completing complex tasks in narrow structures. Swarm of robots in micro-/nanometer scale has also been considered as an important but challenging area in the field of robotics. The large dose could enhance the capability of targeted delivery, and in-vivo tracking capability could be improved due to the higher imaging contrast. Owing to the small size, onboard processors, sensors and actuators cannot be integrated inside, and other physical or chemical interactions should be implemented as the inner "communications" to control the swarm behavior. Among the strategies, magnetic field and fluidic interactions have been regarded as strong and safe tools for generation and controlling of the microrobotic swarm and widely used in the research in our group.
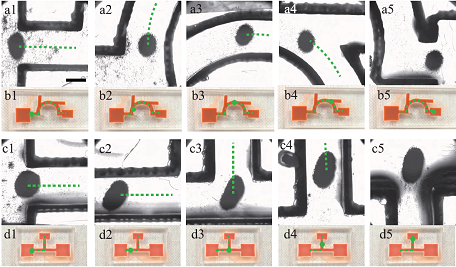
A vortex-like paramagnetic nanoparticle swarm (VPNS) with pattern and motion control capability was proposed and developed [1]. Fe3O4 nanoparticles were selected as the agent, and a rotating magnetic field could assemble the dispersed particles as a swarm. This type of swarm has advantages in controlling large amount of the nanoparticles as a dynamic entity which could increase the efficiency of targeted delivery. The vortex-like swarm is able to perform reversible pattern swelling, shrinking, merging and splitting, and high mobility and controllability could also be achieved.
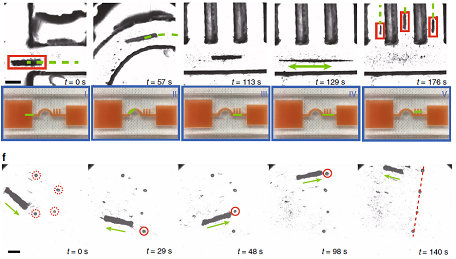
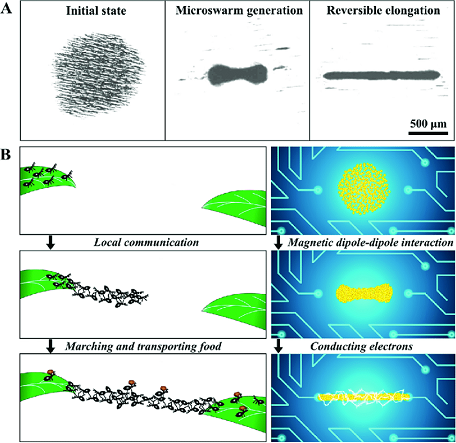
Moreover, a ribbon-like paramagnetic nanoparticle swarm (RPNS) with high flexibility was designed and studied [2]. The swarm could be assembled by applying an oscillating field and the on-demand elongation and shrinking process through adjusting the aspect ratio. The structure is dynamically equilibrium and shows satisfying controllability and stability when travelling through a maze, encountering an obstacle or transporting cargo. It could also split to several smaller swarms to go through different channels for multiple targets, and merge again to form an entire swarm if demanded. As for applications, the promising flexibility and controllability of microrobotic swarms acquire more opportunities for themselves. In biomedical field, vortex-like swarm was applied to enhanced local hyperthermia and thermoablation therapies for tumor treatment [3]. Owing to the swelling and shrinking behavior and controlled locomotion, the concentration of nanoparticles could be tuned up to 500% of traditional methods, and therefore heating effect could be highly localized and enhanced only using reduced dose of nanoparticles. Moreover, micororbotic swarms could also be applied in precise manufacturing area [4]. The ribbon-like swarm could tune the length in order to connect broken circuits in a precisely controlled fashion, just like building a bridge between the gaps of two disconnected electrodes. With integrated circuits becoming smaller and smaller, this method would be more meaningful in both fabricating and repairing circuit structures. Current state of research of the team and outlook
Advanced Nanomaterials & Microrobotics Laboratory (ANML) at CUHK is dedicated to an interdisciplinary research programme that combines micro-/nanotechnology, robotics and control technology and biomedical engineering. Our results have been published on various famed academic journals in this area, such as Nature Communications, Science Robotics, Science Advances, IJRR, IEEE Trans on Robotics, IEEE/ASME Trans on Mechatronics, etc. Our research has also been highlighted by many famous international and local media, such as Nature News, Science News, CNN, SITN at Harvard University, TVB, etc. Thanks to the collaborations with colleagues from the medical school at CUHK, and the newly established research centers (i.e. Chow Yuk Ho Technology Centre for Innovative Medicine (TIM) and CUHK T Stone Robotics Research Institute (CURI)) and financial support from ITF and GRF, we are heading towards more challenging tasks in microrobotics area and pave the way for using medical microrobots for practical in vivo applications. References:
[1] J. F. Yu, L. D. Yang and L. Zhang*, Pattern generation and motion control of a vortex-like paramagnetic nanoparticle swarm, International Journal of Robotics Research (IJRR), Vol. 37, Issue 8, 912-930, 2018.
[2] J. F. Yu, B. Wang, X. Z. Du, Q. Q. Wang and L. Zhang*, Ultra-extensible ribbon-like magnetic microswarm, Nature Communications, Vol. 9, 3260, 2018.
[3] B. Wang, K. F. Chan, J. F. Yu, Q. Q. Wang, L. D. Yang, P. W. Y. Chiu, L. Zhang*, Reconfigurable swarms of ferromagnetic colloids for enhanced local hyperthermia, Advanced Functional Materials, Vol. 28, 1705802, 2018.
[4] D. D. Jin^, J. F. Yu^, K. Yuan, L. Zhang*, Mimicking the structure and function of ant bridge in reconfigurable microswarm for electronic applications, ACS Nano, Vol. 13, Issue 5, 5999-6007, 2019.
[5] Y. B. Zhang, L. Zhang, L. D. Yang, C. I. Vong, K. F. Chan, W. K. K. Wu, T. N. Y. Kwong, N. W. S. Lo, M. Ip, S. H. Wong, J. J. Y. Sung, P. W. Y. Chiu, L. Zhang*, Real-time tracking of fluorescent magnetic spore–based microrobots for remote detection of C. diff toxins, Science Advances, Vol. 5, no. 1, eaau9650, 2019.
|
|
|
Figure 1. Vortex-like paramagnetic nanoparticle swarm (VPNS) actuation through a channel.
|
|
Figure 2. Ribbon-like paramagnetic nanoparticle swarm (RPNS) moves inside a maze, and splits for multiple targets. It also possesses capabilities in precise non-contact manipulation.
|
|
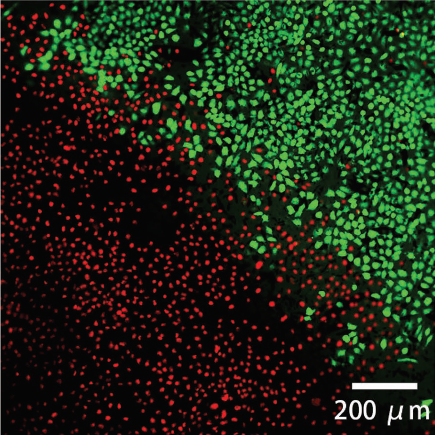
Figure 3. Fluorescence microscopic image of the cells after the magnetic hyperthermia process generated by the shrinking state microrobotic swarm. Living cells are with green color and dead ones are in red color.
|
|
Figure 4. Application of microrobotic swarm in precise manufacturing.
|
|
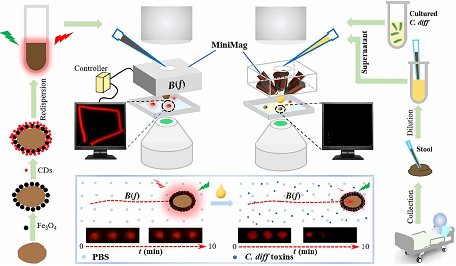
Figure 5. Spore-based biohybrid microrobot for C. diff toxin detection. The microrobot can perform controlled locomotion to detect the toxins by observing the fluorescence change.
|
|
|



