|
Prof. Li Zhang, Department of Mechanical and Automation Engineering, CUHK
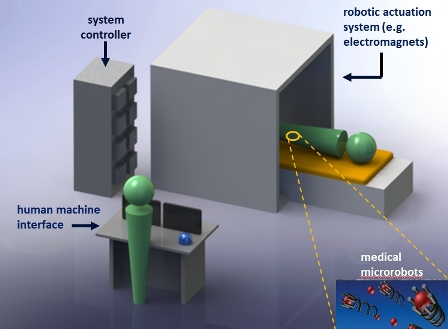
Introduction In recent years, magnetic-field-driven microrobots have drawn much attention because of their enormous potential in minimally invasive biomedical applications such as targeted delivery of drug or energy at difficult-to-reach locations inside the human body (see Fig. 1), materials or stem cell/tissue implantation and biopsy in vivo. Key technological challenges which must be overcome include the development of methods for powering micro-/nanorobots and their controlled locomotion, the development of low-cytotoxic materials with multi-functionalities, actuation, tracking strategy and autonomy of multi-agents in vivo. Among various approaches to remote control of micro-/nanorobots, magnetic actuation is promising for in vivo applications, because weak-strength magnetic fields are harmless to living cells and biological tissue. In the development of morphology at micro-/nanoscales, natural counterparts (e.g. motile microorganisms) can provide guidance. And to tackle robotic tasks on targeted delivery, the microrobots require not only the capability of controlled locomotion in 2-D or 3-D, but also that of effective cargo/energy delivery at the region of interests with high precision. Herein, magnetic microrobots for targeted delivery with different means (i.e. loading samples on microrobots or trapping them by moving microrobots) and swarm control are presented. (a) Porous Hollow Helical Microswimmers for Targeted Delivery
Magnetic helical swimming microrobots inspired by E. coli bacteria can be actuated and steered in a fuel-free manner using an external low-strength rotating magnetic field, thereby generating 3-D locomotion with high precision in a variety of fluidic environments. Recently, we have developed a new type of helical swimming microrobot which consists of a porous outer shell aggregated by magnetite nanoparticles (Fe3O4 NPs) and a helical-shaped inner cavity. The fabrication is straightforward via a cost-effective biotemplating approach using helically shaped spirulina (i.e. a kind of food micro-algae). The main advantages of biotemplating for the fabrication of the microrobots include the following three aspects. First, there is no requirement of cleanroom facilities for micro-fabrication, and the chemical process is facile and green; second, because of the abundance of algae-templates, mass production of the microrobots can be executed with ease; third, the biotemplate (i.e. helical algae) can naturally introduce extra functionalities to the microrobots without involving complicated materials processing procedures. We have reported that the fabricated microswimmers are superparamagnetic and exhibit low cytotoxicity. They are also capable of performing on-demand structural disassembly to form individual NPs using ultrasound. For the first time in the literature of helical microswimmers, a porous hollow architecture has been successfully obtained, thus achieving an ultrahigh specific surface area for surface functionalization and enabling diffusion-based cargo loading/release (see Fig. 2). Furthermore, experimental and analytical results indicate a better swimming performance of the microswimmers than the existing non-hollow helical micromachines of comparable sizes and dimensions. These characteristics of the as-proposed microswimmers suggest a novel microrobotic tool with a high loading capacity for targeted delivery of therapeutic/imaging agents in vitro and in vivo. (b) Fluidic trapping and delivery of microobjects using microvortices generated by magnetic microrobots
Traditionally, optical tweezers (OT), magnetic tweezers (MT) and dielectrophoresis (DEP) have been used to capture and manipulate micro-/nanoscale objects. Though biological samples can be manipulated by OT, MT or DEP, the high power laser energy bonding to magnetic particles or applied electric fields can have a large impact on the viability of biological samples. In contrary to the aforementioned approaches, a strategy for the microrobots to perform pick-and-place/cargo transportation is to generate mobile microvortices that are capable of trapping microscale objects using a small volume of fluid, which can be down to femto-liter, without any mechanical contact between the microrobots and the trapped object. Recently, we have also developed a dumbbell-like magnetic microrobot which can act as a "fluidic tweezer" to trap and deliver microscale cargo with cellular scale resolution. Simulation results indicate that a stronger fluidic trapping can be generated by the microrobots as they are actuated by rotating magnetic fields (see Fig. 3). The pick-and-place manipulation of individual biological cells and microparticles based on mobile microvortices trapping were successfully demonstrated. (c) Swarm control of active magnetic nanoagents
Owing to the constraints of small sizes and volumes of micro-/nanorobots, the amount of drugs that individual microrobots can carry may be critically limited. To tackle the issues, swarm control and manipulation are worth exploring. In comparison to a single agent, larger doses of drugs/materials can be delivered using a microrobotic swarm. Simultaneously, the swarm-like microrobots may have advantages for medical imaging devices with a higher imaging contrast (e.g. IVIS and MRI scanners) to realize in-vivo tracking. Hence, the autonomous control loop can be closed with vision feedback. Recently, we have reported a novel method of using millions of magnetic nanoparticles to generate a dynamic-equilibrium particle-based vortex from dispersed nanoparticles. This micro-vortex-based method of particle gathering is highly effective. Moreover, the vortex-like swarm can be navigated near a solid surface in a controlled manner, and, with a small pitch angle, the swarm keeps its pattern intact during the locomotion [4-5]. This method allows us to use the collective behaviors of active nanoagents and to develop new strategies for the formation, imaging and control of the microrobotic swarm for in vivo applications [6]. Current state of research of the team and outlook
Dr. Zhang's lab at CUHK is dedicated to an interdisciplinary research programme that bridges micro-/nanotechnology and functional materials with MEMS and robotics technology on a small scale. One of the primary research objectives of the team is to develop micro-/nanoscale machines and robotic systems for biomedical applications. Before the PI joined CUHK, he had led a research team in Prof. Bradley Nelson's group at ETH Zurich to develop helical swimming microrobots for many years. His first-author paper on this research topic, entitled "Artificial Bacterial Flagella: Fabrication and Magnetic Control", has received over 600 citations (based on Google Scholar Citations) since 2009. Previously, the team's research work was mainly focused on addressing the fundamental issues of micro-/nanorobotics. Thanks to the collaborations with colleagues from the medical school at CUHK, and the newly established research centres( i.e. Chow Yuk Ho Technology Centre for Innovative Medicine (TIM) and CUHK T Stone Robotics Research Institute (CURI)), we are currently able to conduct microrobotics researches from different aspects to pave the way for using medical microrobots for practical in vivo applications.
Project sites and references:
http://www.cuhklizhanggroup.com
References
[1] X. H. Yan, Q. Zhou, J. F. Yu, T. T. Xu, Y. Deng, T. Tang, Q. Feng, L. M. Bian, Y. Zhang, A. Ferreira, L. Zhang*, Magnetite Nanostructured Porous Hollow Helical Microswimmers for Targeted Delivery, Advanced Functional Materials, Vol. 25, 5333-5342, 2015.
[2] Q. Zhou, T. Petit, B. J. Nelson, L. Zhang*, Dumbbell Fluidic Tweezers: Enhanced Trapping and Manipulation of Microscale Objects Using Mobile Microvortices, Proc. of IEEE International Conference on Robotics and Biomimetics 2014 (IEEE ROBIO 2014), Bali, Indonesia, Dec. 2014. (IEEE ROBIO 2014, Best Paper Award in Biomimetics – Finalist)
[3] Q. Zhou, T. Petit, H. Choi, B. J. Nelson, L. Zhang*, Dumbbell Fluidic Tweezers for Dynamical Trapping and Selective Transport of Microobjects, Advanced Functional Materials, Vol. 27(1), 1604571, 2017.
[4] J. F. Yu, T. T. Xu, Z. Y. Lu, C. I. Vong and L. Zhang*, On-demand Disassembly of Paramagnetic Nanoparticle Chains for Microrobotic Cargo Delivery, IEEE Transactions on Robotics, 2017, DOI: 10.1109/TRO.2017.2693999
[5] J. F. Yu, D. D. Jin, L. Zhang, Mobile Magnetic Nanoparticle-based Vortex for Targeted Cargo Delivery in Fluid, Proc. of 2017 IEEE International Conference on Robotics and Automation (ICRA 2017), Singapore, May 29 - June 3, 2017.
[6] M. Medina-Sánchez and O. G. Schmidt, Medical microbots need better imaging and control, Nature, Vol. 545, 406–408, 2017 Contributor:
Li Zhang is an Associate Professor in the Department of Mechanical and Automation Engineering (MAE) at CUHK. He received the Ph.D. degree (2007) from the University of Basel, Switzerland. He joined the Institute of Robotics and Intelligent Systems (IRIS), ETH Zurich, Switzerland, as a postdoctoral fellow in 2007, and as a senior scientist from 2009 to 2012. Dr. Zhang is a senior member of IEEE, and a Technical Committee (TC) member on Micro/Nano Robotics and Automation in IEEE Robotics and Automation Society (RAS). His research interests include micro- and nanorobotics for biomedicine, and nanomaterials for practical applications. He received the RGC Early Career Award in 2013. He serves as an Editorial Board member of Scientific Reports (NPG), an Associate Editor of Journal of Micro-Bio Robotics (Springer) and "Micro-/Nanorobotics" of International Journal of Advanced Robotic System (SAGE Publishing),
|
|
|
Fig. 1. Schematic of microrobotic targeted delivery for potential in vivo applications such as minimally invasive medicine
|
![Fig. 2. Navigation of a hollow helical swimming microrobot using rotating magnetic fields (Ref. [1])](https://cloud.itsc.cuhk.edu.hk/enewsasp/Photo/12261\42658.jpg)
|
Fig. 2. Navigation of a hollow helical swimming microrobot using rotating magnetic fields (Ref. [1])
|
![Fig. 3. The simulation results indicate that a rotating dumbbell-like microrobot can generate microvortex to trap microscale objects in fluid. (Ref. [2-3])](https://cloud.itsc.cuhk.edu.hk/enewsasp/Photo/12261\2581.jpg)
|
Fig. 3. The simulation results indicate that a rotating dumbbell-like microrobot can generate microvortex to trap microscale objects in fluid. (Ref. [2-3])
|
![Fig. 4. The change in the morphology of a mobile vortex-like swarm. The original patterns of nanoparticle swarms are in red circles in (a1), (b1) and (c1), and the final patterns after locomotion are shown in red dotted curves in (a2), (b2) and (c2). Meanwhile, the original locations are labeled with blue dotted circles. (Ref. [4-5])](https://cloud.itsc.cuhk.edu.hk/enewsasp/Photo/12261\36665.png)
|
Fig. 4. The change in the morphology of a mobile vortex-like swarm. The original patterns of nanoparticle swarms are in red circles in (a1), (b1) and (c1), and the final patterns after locomotion are shown in red dotted curves in (a2), (b2) and (c2). Meanwhile, the original locations are labeled with blue dotted circles. (Ref. [4-5])
|
|
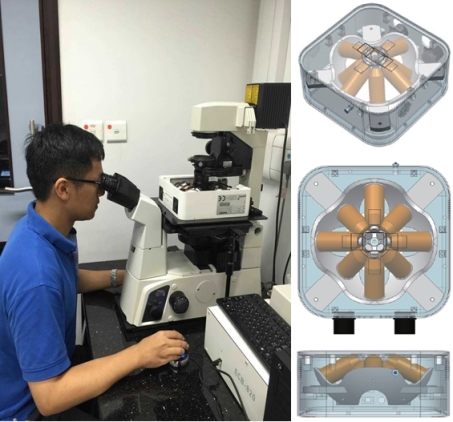
Fig. 5. A PhD student, Mr. Jiangfan Yu, is working on a microrobotic platform, based on electromagnetic coils and an inverted microscope, for conducting targeted delivery experiments in Prof. Zhang’s lab (ERB 202).
|
|
|



