| May 2016 Issue 1 | ||||||
 |
||||||
|
|
| Research | |||||||||||||
| Research and Development: Let Me Give You A Hand: A dexterous robot that helps ENT surgeons with manipulation tasks |
|||||||||||||
|
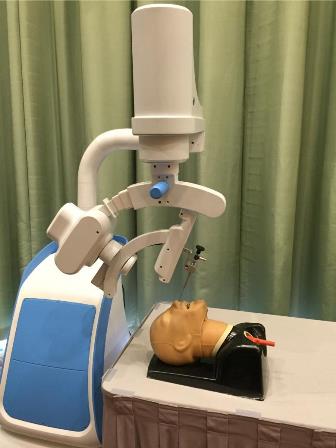
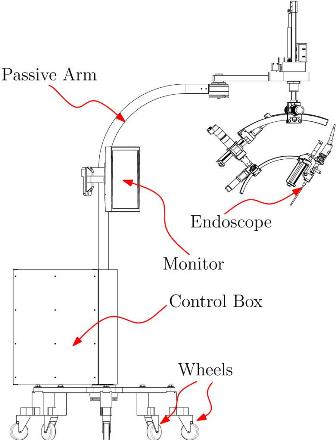
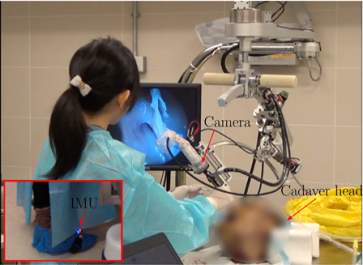
David NAVARRO-ALARCON and Yun-Hui LIU, Department of Mechanical and Automation Engineering, CUHK Abstract We have recently developed a dexterous robotic system which can assist ENT (ear, nose and throat) surgeons with manipulation tasks during sinus surgery. This robot controls the pan, tilt, and zoom motions of the endoscopic camera, and its trajectories are commanded by the surgeon with a wearable foot-control interface. The novelty of this system is that it allows the surgeon to conduct two-hand operations and to retain direct control of the camera, while in traditional surgery, the surgeon must manipulate the endoscopic camera with one hand at all times, leaving only one hand to perform the operation. We have evaluated the performance of the system with simulated head models and ex-vivo experiments. Introduction Endonasal sinus surgery is one of the most common surgical procedures in otolaryngology. The procedure requires the surgeon to introduce an endoscopic camera and a surgical instrument into the patient's nasal cavity through the same entry port, see Fig. 1. During traditional surgery, the surgeon must manipulate the endoscopic camera with one hand at all times; the camera needs to be continuously repositioned during the operation to capture all the different regions of interest. The requirement of continuously holding the camera leaves the surgeon with only one hand to manipulate the surgical instruments, which clearly limits the surgeon's dexterity to perform the operation. The situation is further complicated by the fact that the surgeon needs to remove and insert several types of instruments throughout the surgery. In order to improve the dexterity of the hand-busy surgeon, a common approach is to relieve the camera manipulation task to an assistant surgeon (or a nurse). However, this approach is not the most ergonomic since it requires both the surgeon and assistant to share the same small workspace. Note that these types of ENT operations largely differ from laparoscopic procedures in terms of space and number of entry ports (in the latter case, instruments and camera are typically introduced through different ports). Furthermore, the use of an assistant surgeon carries additional manpower costs and also requires excellent verbal communication between them to properly set the camera's view into the desired region. The Robotic System As an innovative solution to the above-mentioned problems, we have recently developed a robotic system which can take over the camera manipulation task, therefore, serving as a "robotic assistant" to the chief surgeon, see Fig. 2. This system was developed in close collaboration with surgeons from the Faculty of Medicine of CUHK. The objective of this robot manipulator is to release a hand-busy surgeon from the camera manipulation task, so he/she can focus on the surgical procedure. The developed robot allows the surgeon to perform two-hand operations while retaining direct control of the camera's view, something that is not possible to achieve with passive (i.e. non-motorised) camera holders. The system is composed of two main parts: (1) a five degrees-of-freedom (DOF) passive positioning mechanism that the surgeon uses to manually place the endoscope near the entry port (i.e. the nostril) during the initial set-up, and (2) a four DOF motorised manipulator that actively controls the pan, tilt, and zoom motions of the camera. The whole robotic system is mounted on top of a (passive) omnidirectional wheeled platform, which allows it to be easily moved in and out of the operating theatre. Once the system has been setup in the desired configuration, the wheeled platform and the positioning arm can be locked with electromagnetic breaks to fix the robot's configuration. The structure of the robot is depicted in Fig. 3. Since the purpose of this system is to allow the surgeon to use both hands for manipulating the instruments, using a hand control interface, e.g. a simple joystick, would not be the best control approach. For this reason, we developed a hands-free control interface (based on an IMU sensor) that commands the desired motion to the robot through a simple set of "foot gestures". This wearable interface is attached to the surgeon's foot and transmits the measured orientation angles to the robot controller via wireless communication. Fig. 4 depicts some of the gestures that are used to enable the active joint and to command the speed of the motor. Results Several ex-vivo experiments were conducted with cadaver heads to evaluate the performance of the developed prototype, see Fig. 5. These experiments were performed at the dissection laboratory of the School of Biomedical Sciences. In these experiments, we tested the ease by which the robot was manually placed into the desired configuration on top of the head. To evaluate the performance of the system, the surgeon conducted maxillary antrostomy, total ethmoidectomy, and sphenoidotomy on five fresh cadavers, using only the foot-control interface. The conducted experiments demonstrated the feasibility of the developed robotic system in manipulating the endoscope camera. Our research group is currently developing a new version of the robot which has a smaller and lighter structure. We are currently improving the design and functions of the system, and plan to evaluate the new robot with more cadaver experiments. Project sites and references: |
|
||||||||||||
|
|
|||||||||||||
 |
|||||||||||||


|
|
|||||||||||||||||||||||

